Trong lĩnh vực trắc địa, xây dựng và quy hoạch, việc xác định chính xác cao độ đóng vai trò then chốt. Với sự phát triển của công nghệ, máy RTK (Real-Time Kinematic) đã trở thành công cụ không thể thiếu nhờ độ chính xác vượt trội và tốc độ xử lý nhanh. Bài viết này của TCMD Việt Nam sẽ hướng dẫn bạn cách đo cao độ bằng máy RTK một cách chi tiết, từ nguyên lý đến thực hành, giúp bạn nắm vững quy trình và ứng dụng hiệu quả vào công việc.
Nguyên lý đo cao độ của máy RTK
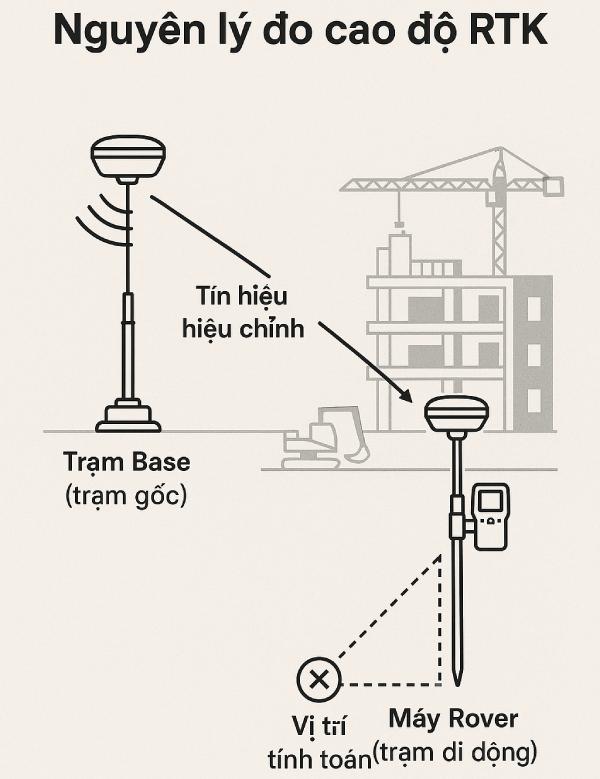
Máy RTK là thiết bị định vị vệ tinh sử dụng công nghệ RTK để cải thiện độ chính xác từ mét xuống centimet. Khác với GPS thông thường, RTK hoạt động dựa trên việc hiệu chỉnh sai số thời gian thực bằng cách kết hợp tín hiệu từ hai thiết bị chính:
- Trạm Base (Trạm gốc/Trạm tĩnh): Được lắp đặt tại một điểm mốc có tọa độ (bao gồm cả cao độ) đã biết chính xác. Nhiệm vụ của Base là thu tín hiệu vệ tinh và truyền dữ liệu hiệu chỉnh về sai số đến máy Rover.
- Máy Rover (Trạm di động): Là thiết bị di chuyển đến các vị trí cần đo. Rover nhận tín hiệu từ các vệ tinh (GPS, GLONASS, Galileo, BeiDou…) và đồng thời nhận dữ liệu hiệu chỉnh từ trạm Base.
Nguyên lý tính toán cao độ:
Máy RTK tính toán vị trí 3 chiều (X, Y, Z) của điểm đo. Trong đó, cao độ được tính dựa trên độ cao ellipsoid (là khoảng cách từ điểm đo đến bề mặt ellipsoid tham chiếu của hệ thống vệ tinh). Tuy nhiên, trong thực tế, chúng ta cần cao độ so với mực nước biển trung bình, hay còn gọi là cao độ chuẩn (orthometric height).
Để chuyển đổi từ độ cao ellipsoid sang cao độ chuẩn, máy RTK sử dụng mô hình Geoid. Mô hình Geoid là một mô hình bề mặt Trái Đất gần với mực nước biển trung bình toàn cầu. Nhờ việc áp dụng mô hình Geoid và cơ chế hiệu chỉnh thời gian thực từ trạm Base, sai số trong tính toán cao độ được giảm xuống đáng kể, thường chỉ còn từ 1–2 cm, đáp ứng yêu cầu khắt khe của các dự án.
Các bước cần chuẩn bị trước khi đo cao độ

Để đảm bảo quá trình đo cao độ bằng máy RTK diễn ra suôn sẻ và cho kết quả chính xác nhất, việc chuẩn bị kỹ lưỡng là vô cùng quan trọng. Bạn cần kiểm tra và thiết lập các yếu tố sau:
-
Kiểm tra và chuẩn bị thiết bị:
- Nguồn điện: Đảm bảo pin của cả Base và Rover đã được sạc đầy đủ. Luôn mang theo ít nhất một bộ pin dự phòng để tránh gián đoạn công việc nếu thời gian đo kéo dài.
- Phụ kiện: Kiểm tra các cáp kết nối, anten, chân máy (tripod) và sào đo (pole) không bị hư hỏng, đảm bảo chúng hoạt động tốt và được lắp ráp chắc chắn.
- Phần mềm điều khiển: Đảm bảo phần mềm điều khiển (ví dụ: FieldGenius, SurPad, Carlson SurvCE, Trimble Access…) đã được cài đặt trên thiết bị di động (điện thoại/máy tính bảng) và được cập nhật lên phiên bản mới nhất. Điều này giúp tận dụng các cải tiến về thuật toán và giao diện.
- Firmware: Kiểm tra và cập nhật firmware mới nhất cho cả máy Base và Rover để đảm bảo tính tương thích và loại bỏ lỗi kỹ thuật.
-
Thiết lập trạm Base Station:
- Vị trí: Chọn vị trí đặt trạm Base thông thoáng, ít vật cản (như cây cối rậm rạp, nhà cao tầng, đường dây điện cao thế) để đảm bảo tín hiệu vệ tinh được thu nhận ổn định và tránh nhiễu đa đường. Vị trí lý tưởng là trên nóc nhà, sân thượng hoặc khu đất trống cao ráo.
- Nhập tọa độ: Nhập chính xác tọa độ và cao độ của điểm mốc chuẩn đã biết vào máy Base. Đây là bước cực kỳ quan trọng vì nó ảnh hưởng trực tiếp đến độ chính xác của toàn bộ phép đo.
- Kích hoạt chế độ phát: Bật chế độ phát tín hiệu hiệu chỉnh trên máy Base (thường qua sóng radio nội bộ hoặc kết nối NTRIP/Internet).
-
Chuẩn bị kết nối mạng/Internet (nếu dùng NTRIP):
- Nếu Base hoặc Rover sử dụng kết nối Internet (qua SIM 4G hoặc Wi-Fi) để nhận/truyền dữ liệu hiệu chỉnh (NTRIP), hãy kiểm tra chất lượng kết nối mạng tại khu vực đo đạc.
- Đặc biệt ở vùng sâu vùng xa, cần xác định trước các “điểm chết” sóng để chủ động dùng thiết bị phát sóng di động hoặc chuyển sang chế độ Base Station vật lý khi cần.
- Cấu hình sẵn thông tin xác thực máy chủ NTRIP (như IP, port, tài khoản) trong phần mềm để tiết kiệm thời gian tại hiện trường.
-
Khảo sát sơ bộ khu vực đo:
- Xác định phạm vi cần đo, các loại địa hình có thể gặp phải (dốc, bằng phẳng, nhiều vật cản).
- Đánh dấu sơ bộ các điểm quan trọng cần đo.
- Kiểm tra điều kiện thời tiết: Tránh đo vào những ngày mưa lớn, sương mù dày đặc hoặc bão từ vì có thể ảnh hưởng nghiêm trọng đến chất lượng tín hiệu vệ tinh và độ chính xác của phép đo.
Việc chuẩn bị tốt sẽ giúp bạn tối ưu hóa hiệu suất làm việc, giảm thiểu sai sót và rút ngắn đáng kể thời gian hoàn thành dự án.
Cách đo cao độ bằng máy RTK chi tiết
Khi mọi công tác chuẩn bị đã hoàn tất, bạn có thể tiến hành đo cao độ theo các bước sau:
Bước 1: Khởi động và thiết lập kết nối hệ thống
- Bật nguồn Base và Rover: Nhấn và giữ nút nguồn trên cả máy Base và Rover để khởi động.
- Thiết lập kết nối RTK: Đảm bảo máy Rover đã kết nối thành công với trạm Base Station. Tùy thuộc vào phương thức truyền dữ liệu (radio hoặc NTRIP/Internet), bạn sẽ thấy đèn báo hiệu trên máy Base chuyển sang màu xanh lá cây hoặc hiển thị trạng thái “Connected” trên phần mềm.
- Cấu hình Rover: Gắn máy Rover lên sào đo (pole), điều chỉnh chiều cao sào đo sao cho phù hợp với tư thế người dùng (thường 1.8m – 2.2m). Trên phần mềm điều khiển, chọn chế độ đo cao độ (thường là “Point Survey”, “Topography Survey” hoặc “Elevation Survey”).
Bước 2: Kiểm tra và đạt trạng thái “Fixed Solution”
- Kiểm tra kết nối: Tại giao diện chính của phần mềm điều khiển, chọn “Connect to Base” và lựa chọn phương thức kết nối tương ứng với trạm Base (Radio, Bluetooth, hoặc NTRIP).
- Đạt trạng thái Fixed: Quan trọng nhất là theo dõi trạng thái kết nối. Máy RTK sẽ hiển thị các trạng thái như:
- Float: Sai số vài decimet, chưa đạt độ chính xác cao.
- Fixed (Fix Solution): Sai số dưới 3 cm (thường 1-2 cm), tín hiệu đã được hiệu chỉnh ổn định.
- Chỉ khi màn hình hiển thị “Fixed”, dữ liệu đo mới đạt độ tin cậy cao và đủ tiêu chuẩn để sử dụng. Nếu máy lâu chuyển sang “Fixed”, hãy kiểm tra lại vị trí đặt Base, cường độ tín hiệu mạng/radio, hoặc di chuyển Rover đến vị trí thoáng đãng hơn.

Bước 3: Tiến hành đo đạc và thu thập dữ liệu
- Tạo dự án mới: Trên phần mềm, tạo một dự án mới bằng cách đặt tên, chọn hệ tọa độ (ví dụ: VN-2000 cho đo đạc tại Việt Nam) và đơn vị đo (mét).
- Đo điểm:
- Di chuyển máy Rover đến vị trí cần đo.
- Giữ sào đo thẳng đứng và cố định tại điểm đo. Sự nghiêng lệch của sào đo sẽ gây ra sai số đáng kể. Một số dòng máy RTK hiện đại có tính năng bù nghiêng IMU cho phép đo mà không cần giữ thẳng tuyệt đối, nhưng vẫn khuyến khích giữ càng thẳng càng tốt.
- Khi màn hình hiển thị trạng thái “Fixed” và độ chính xác đạt yêu cầu, nhấn nút “Save” hoặc “Record” trên ứng dụng để lưu tọa độ và cao độ của điểm.
- Thêm ghi chú mô tả cho từng điểm đo (ví dụ: “Mốc ranh giới A”, “Đỉnh cống thoát nước”, “Điểm khảo sát nền”).
- Đo đường tuyến hoặc mặt bằng:
- Đối với đo đường tuyến (Line Survey) hoặc mặt bằng (Area Survey/Topography Survey), sử dụng các tính năng tương ứng trong phần mềm.
- Máy sẽ tự động ghi nhận các điểm trung gian và tính toán diện tích, chu vi hoặc định tuyến.
Bước 4: Xuất và xử lý dữ liệu
- Tắt thiết bị: Kết thúc phiên đo, tắt nguồn cả hai thiết bị Base và Rover theo đúng trình tự để tránh mất dữ liệu hoặc hỏng hóc.
- Xuất dữ liệu: Trên ứng dụng điều khiển, chuyển đến mục “Export” và xuất file dữ liệu dưới định dạng phù hợp với nhu cầu của bạn:
- DXF/DWG: Dành cho bản vẽ kỹ thuật trong các phần mềm CAD (AutoCAD, MicroStation).
- CSV/TXT: Dạng bảng tính để phân tích dữ liệu chi tiết trong Excel.
- KML/KMZ: Để tích hợp và hiển thị trên Google Earth.
- RINEX: Dành cho xử lý hậu kỳ chính xác cao.
- Xử lý dữ liệu: Chuyển các file dữ liệu đã xuất sang máy tính. Sử dụng phần mềm chuyên dụng như AutoCAD, QGIS, Trimble Business Center, Leica Infinity, hoặc phần mềm của hãng CHCNAV (ví dụ: CHC Geomatics Office) để xử lý, chỉnh sửa, tạo bản đồ hoặc báo cáo cuối cùng.
- Lưu ý quan trọng: Luôn sao lưu file gốc trước khi chỉnh sửa để phòng trường hợp cần đối chiếu lại hoặc có sự cố dữ liệu.
Ưu điểm của phương pháp đo cao độ bằng máy RTK
- Độ chính xác vượt trội: Sai số chỉ từ 1–2 cm, đáp ứng mọi yêu cầu khắt khe của các dự án xây dựng cầu, đường, san lấp mặt bằng, đắp đê, hay khảo sát địa chính.
- Tiết kiệm thời gian và nhân lực: Một người có thể đo hàng trăm điểm/ngày một cách nhanh chóng, hiệu quả hơn rất nhiều so với việc sử dụng máy thủy bình truyền thống.
- Linh hoạt trong mọi địa hình: Hoạt động tốt ở cả những địa hình phức tạp như rừng rậm, khu đô thị có nhiều vật cản, hoặc vùng núi nhờ khả năng bắt sóng vệ tinh mạnh và công nghệ bù nghiêng tiên tiến.
- Dữ liệu thời gian thực: Cung cấp kết quả đo ngay lập tức tại hiện trường, giúp đưa ra quyết định nhanh chóng và giảm thiểu sai sót.
- Tích hợp dễ dàng: Dễ dàng kết nối với các phần mềm và hệ thống GIS (Hệ thống thông tin địa lý) để quản lý và phân tích dữ liệu hiệu quả.
Các lỗi thường gặp và cách khắc phục khi đo cao độ bằng máy RTK
Trong quá trình đo cao độ bằng máy RTK, người dùng có thể gặp một số sự cố hoặc lỗi kỹ thuật ảnh hưởng đến độ chính xác và hiệu quả công việc. Dưới đây là những vấn đề phổ biến và giải pháp khắc phục chi tiết:
Mất kết nối RTK giữa trạm Base và Rover:
- Nguyên nhân: Thường do vật cản (nhà cao tầng, cây cối dày đặc) chặn sóng radio, khoảng cách giữa Base và Rover vượt quá phạm vi hoạt động (thường dưới 10 km đối với radio), hoặc chất lượng mạng 4G kém (nếu dùng NTRIP).
- Khắc phục: Di chuyển trạm Base đến vị trí cao hơn, thông thoáng hơn. Sử dụng bộ khuếch đại sóng radio (repeater) nếu khoảng cách quá xa. Chuyển sang kết nối Internet qua SIM 4G và kiểm tra cường độ tín hiệu mạng. Đảm bảo anten của Base hướng thẳng về phía Rover (nếu dùng radio).
Tín hiệu không về Fixed (Fix Solution):
- Nguyên nhân: Hiện tượng này thường xuất phát từ môi trường làm việc có nhiều chướng ngại vật (cây xanh rậm rạp, khu vực đô thị dày đặc) gây nhiễu tín hiệu vệ tinh, hoặc số lượng vệ tinh bắt được quá ít (< 20 vệ tinh).
- Khắc phục: Di chuyển Rover đến vị trí thoáng đãng, ít bị che khuất tầm nhìn bầu trời. Nếu vấn đề vẫn tồn tại, khởi động lại cả Base và Rover để thiết lập lại kết nối, xóa bỏ các lỗi tạm thời. Kiểm tra xem có đủ vệ tinh đang hoạt động trong khu vực hay không.
Sai số cao độ không ổn định hoặc lớn:
- Nguyên nhân:
– Tọa độ trạm Base nhập không chính xác.
– Mô hình Geoid (dùng để chuyển đổi độ cao ellipsoid sang độ cao thực) chưa được cập nhật hoặc không phù hợp với khu vực đo.
– Nhiễu tín hiệu đa đường (multipath) do tín hiệu vệ tinh phản xạ từ các bề mặt gần đó (kim loại, kính, tường bê tông).
– Chân máy hoặc sào đo không ổn định, bị rung lắc.
- Cách Khắc phục: Kiểm tra lại tọa độ mốc gốc của Base. Tải phiên bản Geoid mới nhất và phù hợp với khu vực đo (ví dụ: VN-2000 hoặc EGM2008 cho Việt Nam). Tránh đo gần các vật thể lớn gây phản xạ tín hiệu, hoặc sử dụng anten có vòng chắn nhiễu (choke ring). Đảm bảo chân máy và sào đo luôn được giữ vững, cân bằng bằng bọt thủy.
Thời gian khởi động (Time To First Fix – TTFF) lâu:
- Nguyên nhân: Máy RTK cần ít nhất 5–10 phút để bắt đủ vệ tinh và đạt trạng thái “Fixed Solution” khi khởi động. Nếu quá trình này kéo dài, có thể do chất lượng tín hiệu vệ tinh kém (ví dụ: ngày có bão từ, nhiều mây), hoặc file almanac (dữ liệu quỹ đạo vệ tinh) trong máy đã cũ.
- Khắc phục: Kiểm tra điều kiện thời tiết. Cập nhật file almanac thông qua phần mềm quản lý để máy thu có thể dự đoán vị trí vệ tinh nhanh hơn. Đảm bảo máy ở vị trí thoáng.
Lỗi do pin yếu hoặc tiếp đất không tốt (đối với Base):
- Nguyên nhân: Pin sắp hết khiến máy ngắt đột ngột, dẫn đến mất dữ liệu. Đối với trạm Base, dây tiếp đất không được cắm sâu vào đất hoặc đất quá khô có thể gây nhiễu điện từ.
- Khắc phục: Luôn mang theo pin dự phòng và sạc đầy trước khi đo. Đảm bảo dây tiếp đất của trạm Base được cắm sâu ít nhất 20 cm vào đất ẩm để tránh nhiễu và đảm bảo hoạt động ổn định.
Kết quả cao độ chênh lệch giữa các lần đo cùng một điểm:
- Nguyên nhân: Có thể do chân máy không ổn định, sai số khi đo điểm kiểm tra, hoặc ảnh hưởng của nhiễu.
- Khắc phục: Sử dụng chân máy chuyên dụng, cân bằng máy bằng bọt thủy chính xác. Luôn đo kiểm tra ít nhất 3 điểm mốc đã biết trước khi bắt đầu đo chính thức để đảm bảo độ tin cậy của hệ thống.
Để hạn chế tối đa lỗi, người dùng nên thực hiện hiệu chuẩn định kỳ cho máy RTK (thường 6 tháng/lần) và tuân thủ chặt chẽ quy trình đo theo hướng dẫn của nhà sản xuất. Khi gặp sự cố phức tạp hoặc không tự khắc phục được, liên hệ ngay với trung tâm bảo hành hoặc nhà cung cấp để được hỗ trợ kỹ thuật chuyên sâu.
Kết luận
Đo cao độ bằng máy RTK là giải pháp tối ưu cho các dự án đòi hỏi độ chính xác cao. Tuy nhiên, để khai thác tối đa hiệu quả của thiết bị, người dùng cần nắm vững nguyên lý hoạt động, thực hiện đúng các bước chuẩn bị, tuân thủ quy trình đo và biết cách xử lý các sự cố thường gặp. Hy vọng hướng dẫn chi tiết trên đây của TCMD đã giúp bạn tự tin hơn khi áp dụng công nghệ này vào thực tế, nâng cao năng suất và chất lượng công việc. Đừng quên bảo dưỡng định kỳ và cập nhật phần mềm để duy trì hiệu suất tốt nhất cho thiết bị của bạn!

