Trong những năm gần đây, xu hướng số hóa di sản và xây dựng bảo tàng ảo đang trở thành một phần không thể thiếu trong công tác bảo tồn. Tuy nhiên, việc đo đạc, thu thập dữ liệu tại các di chỉ khảo cổ – đặc biệt là các không gian ngầm, hang động hay địa đạo sâu – luôn là bài toán thách thức đối với các phương pháp trắc địa truyền thống.
Sự ra đời của công nghệ LiDAR cầm tay thế hệ mới đã mở ra một kỷ nguyên mới. Bài viết này sẽ phân tích chi tiết cách thức máy quét laser di động Feima SLAM200E (E200) giải quyết triệt để các hạn chế này, mang lại giải pháp số hóa 3D trực quan và chính xác cho ngành khảo cổ.
1. Feima SLAM200E – “Mắt Thần” Kỹ Thuật Số Thế Hệ Mới
Máy quét laser cầm tay Feima SLAM200E (thường gọi là E200) đến từ hãng Feima Robotics là thiết bị quét LiDAR 3D di động sở hữu những thông số kỹ thuật ấn tượng, đáp ứng hoàn hảo các yêu cầu khắt khe của công tác khảo cổ:
-
Độ chính xác tương đối vượt trội: Lên tới 5mm, đảm bảo các mô hình tái dựng đạt độ tin cậy cực cao ở cấp độ trắc địa.
-
Tốc độ thu thập dữ liệu siêu khủng: Đạt 320.000 điểm/giây, cho phép ghi lại chi tiết thảm thực vật, cấu trúc địa hình hay các hiện vật nhỏ một cách mịn màng.

-
Góc quét siêu rộng: Với góc quét 360° ngang và 270° dọc, thiết bị giúp bao phủ toàn bộ không gian xung quanh chỉ bằng một lần di chuyển qua, loại bỏ hoàn toàn các “góc chết” dữ liệu.
-
Tầm quét xa lý tưởng: Khoảng cách quét lên đến 120 mét, giúp thu thập dữ liệu của các vòm hang cao hay các cấu trúc kiến trúc vĩ mô một cách dễ dàng.
-
Tích hợp Camera toàn cảnh kép 12MP: Tự động gán màu sắc thực tế (RGB) lên bản đồ đám mây điểm (Point Cloud) theo thời gian thực.
2. Các Ứng Dụng Thực Tế Của Máy Quét Feima SLAM200E (E200)
Nhờ những ưu thế vượt trội về phần cứng và thuật toán, Feima SLAM200E đóng vai trò như một giải pháp cứu cánh giúp giải quyết bài toán đo đạc mà ngay cả các thiết bị trắc địa truyền thống hay Drone (UAV) cũng phải “bó tay”.
2.1. Ứng dụng chung trong công tác khảo cổ và bảo tồn di sản
Đối với các di chỉ khảo cổ nói chung, Feima E200 giải quyết triệt để các hạn chế của phương pháp đo đạc thủ công nhờ khả năng xây dựng mô hình số hóa 3D trực quan, nhanh chóng:
-
Số hóa không gian ngầm (mộ cổ, địa đạo): Máy tự định vị dựa vào cấu trúc không gian xung quanh thông qua thuật toán SLAM tích hợp để dựng mô hình mà không cần định vị GPS. Góc quét rộng bao phủ trần, vách hầm mộ chỉ bằng việc đi bộ qua.
-
Tư liệu hóa hiện vật và cấu trúc kiến trúc cổ: Nhờ cụm camera 12MP, màu sắc thực tế (RGB) được gán trực tiếp lên đám mây điểm. Điều này giúp lưu trữ hình ảnh hiện vật, hoa văn trên cột gỗ/bức tường cổ sinh động, trung thực.
-
Bảo tồn di sản không tiếp xúc: Tốc độ quét cực cao giúp tái dựng hoàn hảo các chi tiết nhỏ của hiện vật khảo cổ mà không cần chạm trực tiếp, tránh hoàn toàn nguy cơ làm hư hại cấu trúc gốc của di sản.
-
Khảo sát địa hình và tìm kiếm dấu vết lộ thiên: Khi di chỉ nằm trong rừng sâu, công nghệ LiDAR của E200 xuyên qua tán lá thu thập dữ liệu bề mặt đất thật (Bare Earth), làm lộ ra nền móng kiến trúc cổ hoặc gò mộ bị ẩn giấu.
-
Phục vụ bảo tàng số (Virtual Tour): Thiết bị hỗ trợ công nghệ tái cấu trúc 3DGS (Gaussian Splatting) tạo ra các mô hình 3D chân thực như ảnh chụp, giúp các bảo tàng dễ dàng xây dựng không gian tham quan thực tế ảo (VR/AR) cho công chúng.
2.2. Ứng dụng chuyên sâu trong di chỉ khảo cổ hang động
Trong môi trường lòng đất khắc nghiệt và siêu vĩ mô như hang Sơn Đoòng – nơi các thiết bị truyền thống hay Drone thông thường gặp rất nhiều hạn chế, SLAM200E chứng minh năng lực vượt trội vượt bậc:
-
Giải quyết môi trường mất hoàn toàn GPS: Sơn Đoòng nằm sâu dưới lòng đất đá vôi, nơi tín hiệu vệ tinh bằng không. Máy sử dụng thuật toán SLAM thế hệ mới để tự định vị dựa vào việc nhận diện các vách đá, trần hang xung quanh.
-
Quét liên tục nhờ tính năng “Breakpoint Resumption”: Khi đội khảo cổ phải di chuyển qua các địa hình hiểm trở, đu dây hoặc lội sông ngầm, họ có thể tạm dừng máy và bật lại để quét tiếp mà dữ liệu không bị rời rạc.
-
Số hóa các cấu trúc siêu vĩ mô và vi mô: Với tầm quét xa 120m, máy dễ dàng thu thập dữ liệu trần hang cao tới 200m và các khối thạch nhũ khổng lồ (như khối “Bàn tay của Chó”) mà không cần tiếp cận trực tiếp. Đồng thời, độ chính xác cấu trúc 5mm ghi lại chi tiết từng nếp gấp thạch nhũ, bãi ngọc động hay các tầng trầm tích cổ.

-
Tái dựng các hố sụt (Doline) bằng thuật toán Hợp nhất Không – Địa: Tại các hố sụt mở ra bầu trời nơi có thảm thực vật (như “Vườn địa đàng”), thuật toán độc quyền của Feima cho phép đồng bộ hóa dữ liệu LiDAR bay chụp từ Drone trên cao với dữ liệu quét cầm tay SLAM200E dưới lòng hang. Kết quả tạo ra mô hình 3D xuyên suốt từ bề mặt thềm lục địa đến đáy sâu hang động.
-
Lưu trữ màu sắc nguyên bản dưới lòng đất: Màu xanh của rêu hoang mạc, màu vàng xám của đá vôi hay màu nước ngầm được lưu giữ chính xác tuyệt đối, hỗ trợ xuất định dạng 3DGS phục vụ các trạm trải nghiệm Sơn Đoòng thực tế ảo (VR 5D).
-
Đo đạc hiện trường nhanh không cần Internet: Qua ứng dụng SLAM Instant APP trên máy tính bảng, các chuyên gia có thể đo kích thước, thể tích khối đá đổ lở hoặc diện tích vòm hang ngay tại chỗ mà không cần sóng internet hay đợi xử lý hậu kỳ phức tạp tại văn phòng.
3. Quy Trình 5 Bước Đưa Mô Hình 3D Về Hệ Tọa Độ Quốc Gia VN-2000
Một câu hỏi lớn được các kỹ sư trắc địa quan tâm: Làm sao đưa mô hình 3D từ máy quét SLAM trong lòng hang (nơi mất sóng GPS) về đúng hệ tọa độ quốc gia VN-2000? Giải pháp chính là áp dụng phương pháp “dẫn tọa độ từ ngoài cửa hang vào trong” kết hợp bố trí hệ thống Điểm kiểm soát mặt đất (GCP – Ground Control Points) theo quy trình chuẩn sau:
Bước 1: Thiết lập cụm điểm gốc ngoài cửa hang (Khống chế ngoại vi)
-
Đặt ít nhất 3 điểm GCP ở khu vực ngoài cửa hang hoặc vùng giếng trời (Hố sụt – Doline) có bầu trời thông thoáng.
-
Sử dụng thiết bị GNSS RTK để đo tĩnh hoặc đo GPS-RTK nhằm lấy chính xác tọa độ (X, Y, Z) theo hệ VN-2000 (lưu ý cài đặt đúng Kinh tuyến trục và Múi chiếu $3^{\circ}$ hoặc $6^{\circ}$ của địa phương).
Bước 2: Bố trí tiêu mục (Targets) làm GCP trong lòng hang
-
Sử dụng các tấm tiêu chuyên dụng (checkerboard hoặc tấm phản quang tròn có tâm) cố định chắc chắn dọc theo tuyến khảo sát.
-
Mật độ phân bổ từ 30 – 50 mét nên đặt một điểm GCP. Nên xếp đặt theo hình zigzag (vách trái, vách phải, dưới nền) và bắt buộc phải đặt chốt GCP tại các khúc cua gắt để khống chế sai số tích lũy (drift) của thuật toán SLAM.
Bước 3: Đo dẫn nối tọa độ vào lòng hang (Traverse)
-
Sử dụng Máy toàn đạc điện tử (Total Station) đặt từ cụm điểm gốc ngoài cửa hang (đã biết tọa độ VN-2000), ngắm và đo truyền tọa độ góc/cạnh đến tấm tiêu đầu tiên trong hang.
-
Tiếp tục chuyển máy vào trong, thực hiện đường chuyền trắc địa dẫn chuyền qua toàn bộ các tiêu mục. Kết quả thu được là danh sách tọa độ VN-2000 chính xác của tất cả các tiêu trong hang.
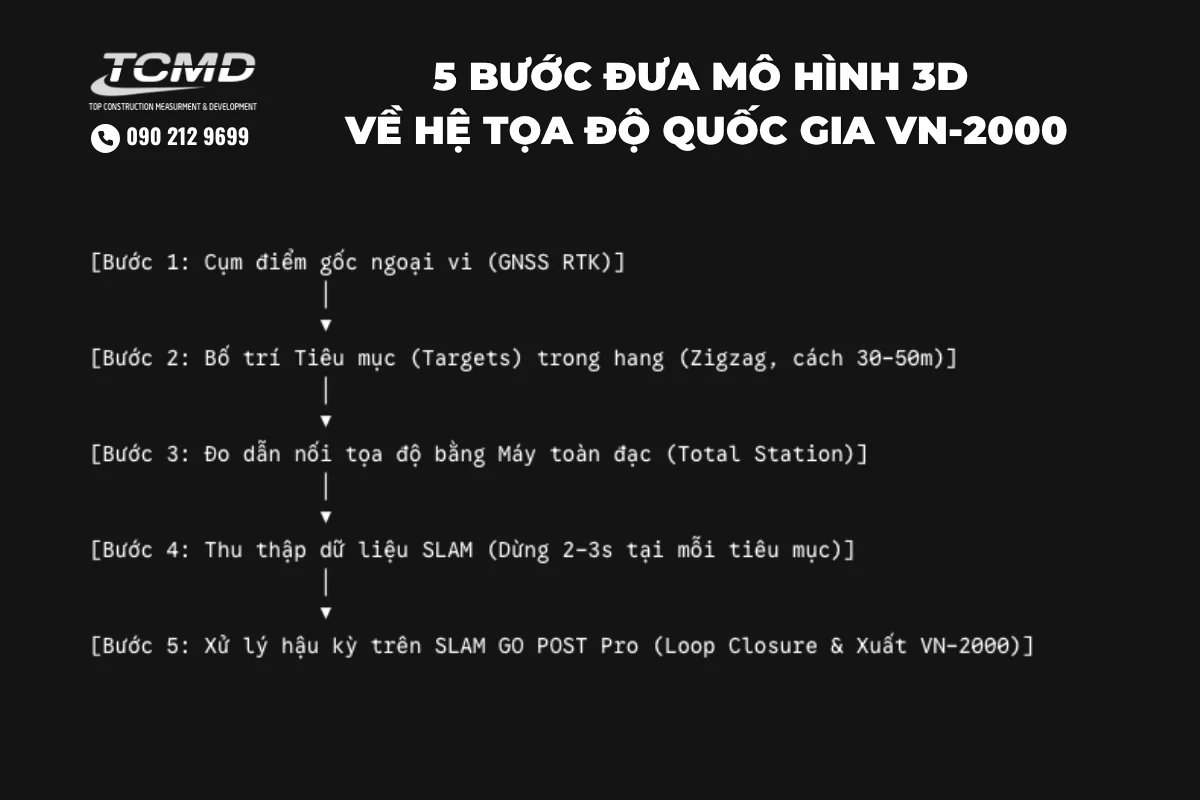
Bước 4: Thu thập dữ liệu bằng Feima SLAM200E
-
Khởi động máy quét ở trạng thái tĩnh ngoài cửa hang để thuật toán khởi tạo tốt (quét qua các GCP ngoài trời trước).
-
Khi di chuyển qua các vị trí đặt tiêu mục trong hang, hướng máy quét trực tiếp vào tấm tiêu và đứng yên khoảng 2 – 3 giây ở khoảng cách từ 2 – 5 mét. Điều này giúp LiDAR quét đậm đặc và camera chụp rõ tâm tiêu để phần mềm tự động nhận diện.
Bước 5: Xử lý hậu kỳ gán tọa độ (Georeferencing)
-
Nạp toàn bộ dữ liệu đám mây điểm gốc và file tọa độ VN-2000 của các GCP vào phần mềm SLAM GO POST Pro.
-
Phần mềm thực hiện khớp nối điểm (Rigid Transformation) và tối ưu hóa vòng lặp (Loop Closure Optimization) nhằm “uốn” và sửa các sai số uốn lượn hay kéo dài.
-
Kết quả xuất ra là mô hình Đám mây điểm (Point Cloud) hoặc lưới bề mặt (Mesh) nằm chuẩn xác trên hệ tọa độ quốc gia VN-2000.
Lời Kết
Với khả năng hoạt động độc lập không phụ thuộc GPS , độ chính xác cao và quy trình tích hợp tọa độ VN-2000 chặt chẽ , Feima SLAM200E chính là giải pháp mang tính cách mạng cho ngành khảo cổ học và bảo tồn di sản. Công nghệ này không chỉ giúp tối ưu hóa thời gian và nhân lực trên thực địa mà còn mở ra kho tàng dữ liệu số hóa vô giá cho thế hệ tương lai.

