Trong kỷ nguyên số hóa hiện nay, công nghệ SLAM (Simultaneous Localization and Mapping) đã trở thành “chìa khóa” để giải quyết các bài toán đo đạc tại những khu vực không có tín hiệu vệ tinh. Nổi bật trong số đó là thiết bị SLAM200 (phiên bản Feima SLAM200) – một giải pháp đột phá sở hữu cơ chế xoay cơ học 360 độ kết hợp thuật toán SLAM tự động, mang lại hiệu suất vượt trội so với các dòng máy quét góc nhìn cố định truyền thống.
1. Cơ chế xoay cơ học 360 độ và hiệu suất thu thập dữ liệu SLAM200 Feima
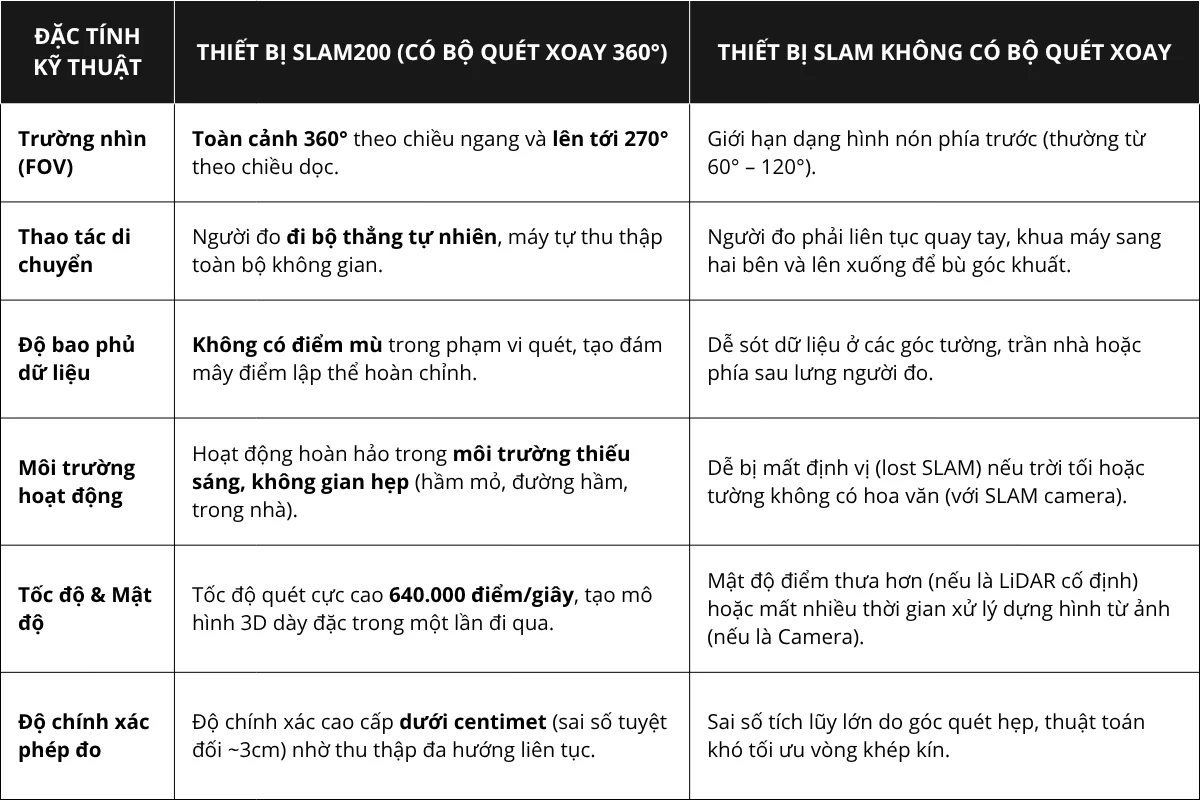
Sự khác biệt cốt lõi giữa SLAM200 và các thiết bị SLAM thông thường nằm ở cơ chế thu nhận dữ liệu chủ động thông qua bộ quét xoay 360° kết hợp với thuật toán SLAM tự động. Trong trắc địa, việc mở rộng trường nhìn (Field of View – FOV) không chỉ đơn thuần là nhìn rộng hơn, mà là giải quyết bài toán định vị và khép sai số một cách triệt để.
Trong khi các thiết bị SLAM camera (Visual SLAM) hoặc LiDAR có góc nhìn cố định bị giới hạn trong một “hình nón” phía trước (thường từ 60° đến 120°), SLAM200 sở hữu trường nhìn toàn cảnh 360° theo chiều ngang và lên tới 270° theo chiều dọc.
Đặc điểm này cho phép:
- Loại bỏ điểm mù: Máy tự động thu thập toàn bộ không gian xung quanh (trần, sàn, hai bên vách và phía sau lưng) chỉ trong một lần di chuyển.
- Mật độ điểm cực cao: Với tốc độ 640.000 điểm/giây, thiết bị tạo ra một đám mây điểm lập thể hoàn chỉnh và dày đặc, giúp việc tái tạo các bề mặt gồ ghề đạt độ chi tiết tối đa.
Một thách thức lớn trong trắc địa bằng công nghệ SLAM là sai số tích lũy (drift). Với bộ quét xoay 360°, máy liên tục nhìn thấy đồng thời cả vật thể phía trước và các điểm đặc trưng cũ ở phía sau. Thuật toán nhờ đó dễ dàng nhận diện lại các tọa độ cũ để thực hiện lệnh Loop Closure (khóa vị trí), giúp bản đồ không bị lệch hoặc chồng chéo khi thực hiện các tuyến đo dài.
Các thiết bị không xoay chỉ nhìn thấy không gian phía trước, khiến sai số tích lũy lớn hơn và khó tối ưu hóa vòng khép kín, dẫn đến hiện tượng mô hình bị “cong vẹo” khi đi sâu vào hầm lò hoặc các khu vực phức tạp.
Dưới đây là bảng so sánh chi tiết các khác biệt cốt lõi giữa hai dòng thiết bị:
Nhờ cơ chế quét xung quanh độc lập hoàn toàn với hướng di chuyển của người đo, SLAM200 không chỉ giới hạn ở việc cầm tay. Thiết bị có thể dễ dàng gắn lên:
- Máy bay không người lái (UAV) để khảo sát từ trên cao.
- Ô tô hoặc xe máy để số hóa hạ tầng giao thông tốc độ cao.
- Balo (Backpack) để giải phóng hai tay cho kỹ sư khi leo trèo trong địa hình hiểm trở.
2. Ứng dụng SLAM200 Feima trong khảo sát
2.1. Ứng dụng SLAM200 trong khai thác Mỏ và Khoáng sản
Trong công tác quét hầm mỏ để tính toán khối lượng khai thác (thể tích đào đắp hoặc trữ lượng), sự khác biệt giữa thiết bị có bộ quét LiDAR xoay 360 độ như SLAM200 và các thiết bị góc quét cố định là vô cùng lớn. Nó không chỉ quyết định đến độ chính xác của con số mét khối (m³) mà còn ảnh hưởng trực tiếp đến độ an toàn và thời gian vận hành của kỹ sư trong lò.
Thu thập trọn vẹn hình học hầm lò (Nóc lò, vách lò, gương lò)
- Với SLAM200 (Xoay 360°)
Trục xoay cơ học liên tục quét sải rộng toàn bộ không gian hầm lò khi kỹ sư di chuyển. Máy tự động chụp lại đồng thời nóc hầm (trần), nền hầm, hai bên vách đá và các vì chống mà không bỏ sót bất kỳ góc khuất nào.
Kết quả là một đám mây điểm (point cloud) dạng đường ống khép kín hoàn chỉnh, giúp tính toán thể tích rỗng của hầm với độ chính xác tuyệt đối.
- Với thiết bị KHÔNG xoay:
Do góc quét hẹp, kỹ sư buộc phải thực hiện thao tác khua tay lên xuống và quay người liên tục khi di chuyển. Trong môi trường hầm tối, việc di chuyển không tự nhiên này dễ làm mất dấu đặc trưng, gây ra lỗi trượt thuật toán (lost SLAM) và tạo ra các “lỗ thủng” dữ liệu trên trần lò hoặc các ngách rẽ.
Thuật toán tự động “Khóa vòng khép kín” (Loop Closure) trong môi trường Non-GNSS
- Cơ chế hoạt động: Hầm mỏ là môi trường hoàn toàn không có tín hiệu vệ tinh, do đó thuật toán SLAM phải tự dựa vào việc nhận diện cấu trúc vách đá để định vị.
- Lợi thế của SLAM200: Nhờ mắt quét xoay 360° nhìn thấy đồng thời cấu trúc phía trước và cấu trúc vừa đi qua ở phía sau, máy liên tục đối chiếu và triệt tiêu sai số tích lũy (drift) một cách tự động.
- Hạn chế của thiết bị KHÔNG xoay: Máy chỉ nhìn thấy không gian phía trước. Khi đi sâu vào hầm dài và quay trở ra, sai số tích lũy của thiết bị không xoay sẽ rất lớn, khiến mô hình 3D đường hầm bị cong vẹo, dẫn đến sai số nghiêm trọng khi tính khối lượng đào đắp.
Tốc độ thu thập dữ liệu và đảm bảo an toàn cho kỹ sư trắc địa
- Hiệu suất cực cao: SLAM200 sở hữu tốc độ quét lên tới 640.000 điểm/giây. Kỹ sư chỉ cần đi bộ với tốc độ thông thường qua các khu vực gương lò, lò chợ hay kho chứa.
- Tối ưu thời gian: Thời gian tiếp xúc với các khu vực nguy hiểm, dễ sụt lún hoặc thiếu oxy được giảm thiểu xuống mức thấp nhất, rút ngắn tới 80% thời gian so với việc sử dụng máy toàn đạc truyền thống.
- Độ chi tiết bề mặt: Các thiết bị không xoay yêu cầu người đo đi chậm hơn và dừng lại tại nhiều điểm để quét khua máy, làm tăng thời gian đứng dưới hầm lò. Mật độ điểm thưa của dòng máy này cũng khiến các bề mặt đá gồ ghề bị “mịn hóa”, làm lệch kết quả tính toán mét khối.
Khả năng kết hợp phụ kiện chuyên dụng cho ngành mỏ
Cơ chế quét xoay độc lập với hướng chuyển động cho phép SLAM200 linh hoạt chuyển đổi cấu hình, điều mà các dòng máy quét cầm tay góc cố định không thể thực hiện được:
- Chế độ Balo (Backpack): Gắn máy ra sau lưng để giải phóng hai tay, giúp kỹ sư dễ dàng leo trèo qua các đường lò dốc hoặc lò ngầm.
- Gắn gậy kéo dài / Treo dây: Có thể thả thiết bị xuống các giếng mỏ sâu, hốc sụt lún hoặc đưa máy vào các khu vực gương lò nguy hiểm đã cấm người vào để thực hiện quét từ xa.

Tổng kết bài toán tính khối lượng hầm mỏ
Sử dụng SLAM200 giúp xuất ra mô hình 3D lưới (Mesh) hoặc mặt nền (DEM) của hầm lò có độ chính xác tới từng centimet. Từ mô hình khép kín này, các phần mềm trắc địa mỏ chuyên dụng (như CloudCompare, Geomagic, hay phần mềm đi kèm của Feima) sẽ tự động tính toán thể tích vật thể rắn của khối đá hoặc than đã được đào đi một cách nhanh chóng và chính xác.
2.2. Ứng dụng SLAM200 trong công tác Quy hoạch
Trong lĩnh vực Quy hoạch (bao gồm quy hoạch đô thị, hạ tầng giao thông, nông thôn hoặc quy hoạch vùng), vai trò của thiết bị SLAM LiDAR xoay 360 độ như SLAM200 dịch chuyển từ việc đo đạc chi tiết không gian hẹp sang bài toán số hóa hiện trạng diện rộng trên mặt đất. Dưới đây là sự phân tích sâu về lợi thế vượt trội của cơ chế quét xoay 360° đối với ngành quy hoạch:
Khả năng thu thập toàn cảnh hiện trạng (Tầng cao và Mặt đất)
- Với SLAM200 (Xoay 360°): Nhờ trường nhìn cực rộng, thiết bị cho phép kỹ sư vừa di chuyển vừa quét được toàn bộ mặt đứng kiến trúc (façade) của các tòa nhà cao tầng, hệ thống dây điện, tán cây xanh, cùng chi tiết vỉa hè và lòng đường chỉ trong một lần đo.
- Giá trị dữ liệu: Các dữ liệu này là nền tảng cốt lõi để xây dựng mô hình đô thị 3D (3D City Model), giúp kiến trúc sư hình dung trực quan hiện trạng phục vụ quy hoạch cảnh quan.
- Hạn chế của thiết bị không xoay: Do góc nhìn bị giới hạn phía trước, người đo phải liên tục ngửa máy lên trời và khua máy để quét các tầng cao, dẫn đến nguy cơ mất định vị (lost SLAM) tại các ngã tư hoặc không gian mở lớn.
Tốc độ số hóa hiện trạng: “Quét đến đâu, có bản đồ đến đó”
- Hiệu suất thu thập: Với tốc độ 640.000 điểm/giây và cơ chế quét vòng tròn, SLAM200 cho phép tích hợp linh hoạt lên balo đeo lưng, nóc ô tô hoặc xe máy để khảo sát dọc các tuyến phố cần quy hoạch cải tạo.
- So sánh thực tế: Tốc độ này nhanh gấp hàng chục lần so với phương pháp sử dụng máy toàn đạc hoặc máy quét laser mặt đất (TLS) truyền thống vốn yêu cầu đặt trạm máy tĩnh (tripod).
- Nhược điểm máy góc hẹp: Các thiết bị không xoay không thể thu thập dữ liệu chính xác khi di chuyển ở tốc độ cao (như gắn trên xe), bắt buộc người dùng phải đi bộ rất chậm, gây lãng phí thời gian khi khảo sát khu vực rộng lớn hàng héc-ta.

Khả năng bóc tách đối tượng quy hoạch (Feature Extraction)
Mật độ đám mây điểm (point cloud) dày đặc và đồng đều từ mọi hướng của bộ quét xoay giúp các phần mềm trắc địa chuyên dụng thực hiện phân lớp dữ liệu (Classification) tự động:
- Địa hình tự nhiên: Tách riêng mặt nền để xây dựng bản đồ độ dốc, hướng dốc phục vụ thiết kế xây dựng.
- Hạ tầng kỹ thuật: Nhận diện hệ thống cột đèn, biển báo, tủ điện, hố ga hiện hữu.
- Giải phóng mặt bằng: Đo đạc chính xác khoảng cách hành lang lưới điện, chỉ giới đường đỏ và mật độ xây dựng thực tế để lập phương án đền bù.
Tích hợp đa nền tảng – Chìa khóa cho quy hoạch diện rộng
Quy hoạch luôn đòi hỏi dữ liệu trên diện tích lớn, và SLAM200 thể hiện ưu thế tuyệt đối nhờ khả năng gắn lên máy bay không người lái (UAV):
- Quét từ trên cao (UAV): Thu hoạch mô hình độ cao số hóa (DEM/DSM) xuyên qua các lớp tán cây dày, điều mà phương pháp chụp ảnh hàng không (Photogrammetry) thông thường không làm được.
- Quét dưới mặt đất: Kết hợp cầm tay hoặc gắn ô tô để đo chi tiết các ngõ ngách mà UAV bị khuất tầm nhìn.
- Hợp nhất dữ liệu: Dữ liệu từ trên không và mặt đất được đồng bộ hoàn hảo nhờ cùng một hệ thống cảm biến xoay, tạo ra bản đồ hiện trạng quy hoạch “không góc chết”.
Tóm lại cho công tác quy hoạch:
Thiết bị SLAM xoay 360 độ cung cấp một “bản sao số” (Digital Twin) chính xác tuyệt đối theo tỉ lệ 1:1. Điều này giúp các nhà quản lý đưa ra phương án thiết kế chuẩn xác, tính toán khối lượng giải phóng mặt bằng thực tế và giảm thiểu tối đa sai số khi triển khai dự án từ bản vẽ ra thực địa.
2.3. SLAM200 trong công tác Khảo sát – Thiết kế và bàn giao dữ liệu 3D (BIM)
Trong các dự án khảo sát thiết kế kiến trúc, hạ tầng giao thông và hệ thống cơ điện (MEP), thiết bị SLAM LiDAR xoay 360 độ như SLAM200 đóng vai trò là công cụ thu thập dữ liệu “đầu vào” tối quan trọng. Máy giúp chuyển đổi toàn bộ hiện trạng thực tế thành mô hình kỹ thuật số chính xác đến từng centimet, thay thế hoàn toàn các phương pháp đo đạc thủ công truyền thống.
Lợi thế cốt lõi trong quy trình Khảo sát – Thiết kế
- Phục vụ thiết kế cải tạo (As-built to BIM): Cơ chế xoay 360 độ cho phép máy chụp lại toàn bộ cấu trúc phức tạp như dầm, cột, sàn và các chi tiết phào chỉ. Kỹ sư chỉ cần cầm máy đi qua các phòng, dữ liệu mặt đứng và mặt bằng sẽ được thu thập đồng thời.
- Số hóa hệ thống MEP: Đối với các không gian kỹ thuật phức tạp như dưới trần thạch cao hoặc phòng máy, mắt quét 360° ghi lại chính xác vị trí từng đường ống nước, máng cáp và ống gió, giúp tránh xung đột vị trí (clash detection) khi thiết kế hệ thống mới.
- Khảo sát tuyến hạ tầng: SLAM200 có thể gắn lên ô tô hoặc xe máy để quét toàn bộ mặt đường, lề đường và cao độ cửa nhà dân với độ chính xác cao. Từ đám mây điểm dày đặc, các phần mềm sẽ tự động trích xuất trắc dọc, trắc ngang tại bất kỳ vị trí nào trên tuyến.
- Mô hình nền địa hình (Topographic Map): Khác với phương pháp Photogrammetry, tia laser từ SLAM200 có khả năng xuyên qua kẽ lá để chạm xuống mặt đất, giúp tính toán chính xác mô hình số độ cao (DEM) và khối lượng đào đắp (Cut and Fill).
Quy trình bàn giao dữ liệu chuyên sâu cho BIM/Revit
Việc sử dụng SLAM200 mang lại lợi thế tối ưu cho quy trình Scan-to-BIM nhờ đám mây điểm có độ đồng đều cao và không bị rỗng bề mặt.
Bước 1: Xử lý số liệu thô và xuất Đám mây điểm (Point Cloud)
- Sử dụng phần mềm chuyên dụng (Feima Studio hoặc SLAM Manager) để tính toán quỹ đạo, tối ưu hóa thuật toán vòng khép kín (Loop Closure) và lọc nhiễu.
- Dữ liệu được xuất ra các định dạng tiêu chuẩn như .e57 hoặc .las.
Bước 2: Chuẩn hóa qua Autodesk ReCap Pro
- Nạp file vào Autodesk ReCap Pro để phân tầng (Set Floor Levels) và thiết lập hệ tọa độ thực (nếu có đo nối mốc GPS).
- Xuất ra định dạng .rcp hoặc .rcs – đây là các định dạng “gốc” giúp Revit mở mượt mà, không bị giật lag.
Bước 3: Dựng mô hình 3D trong Revit (Scan-to-BIM)
- Thiết lập cấu trúc: Dùng công cụ vẽ Tường (Wall), Cột (Column), Dầm (Beam) bám dính (Snap) trực tiếp vào bề mặt đám mây điểm. Độ xoay 360° của SLAM200 đảm bảo xác định chính xác độ dày tường hiện trạng.
- Dựng hệ thống MEP: Đội thiết kế dựa vào các đường ống dạng trụ tròn hiển thị rõ nét trên đám mây điểm để vẽ ống gió, ống nước và máng cáp chuẩn xác 100% so với thực tế.
- Kiểm tra xung đột: Sử dụng tính năng Interference Check trong Revit hoặc chuyển mô hình sang Navisworks để kiểm tra sự đâm xuyên giữa cấu trúc mới và hiện trạng cũ.

Mẹo tối ưu hóa và tăng tốc độ dựng hình
Để tăng 50% tốc độ dựng hình, kỹ sư nên áp dụng các giải pháp sau:
- Sử dụng Camera màu (RGB): Bật camera gắn kèm khi quét để gán màu thực tế cho đám mây điểm, giúp phân biệt nhanh các vật liệu và hệ thống kỹ thuật (ví dụ: ống cứu hỏa màu đỏ).
- Cài đặt Plugin tự động: Sử dụng các công cụ như Asbuilt for Revit để nhận diện mặt phẳng tường/sàn, hoặc EdgeWise để tự động nhận diện ống tròn và thép kết cấu, giúp tiết kiệm hàng tuần vẽ tay cho các nhà xưởng lớn.
Với SLAM200, quy trình một người thực hiện đeo balo hoặc cầm tay có thể rút ngắn 90% thời gian khảo sát thực địa và đảm bảo dữ liệu đầu ra đạt tiêu chuẩn cao nhất cho các dự án BIM chuyên nghiệp.
2.4. SLAM200 trong khảo sát Công trình kiến trúc/Nhà xưởng và Hạ tầng/Đường giao thông
Đối với hai đối tượng khảo sát này, thiết bị SLAM200 với cơ chế quét xoay 360° phối hợp cùng phần mềm Revit tạo nên một quy trình Scan-to-BIM cực kỳ mạnh mẽ. Do đặc thù cấu trúc khác nhau, kỹ thuật dựng hình (modeling) từ dữ liệu đám mây điểm (Point Cloud) sẽ được thực hiện theo các phương pháp chuyên biệt.
Đối với Công trình kiến trúc và Nhà xưởng (BIM Kiến trúc & Kết cấu)
Nhà xưởng thường có diện tích sàn lớn, hệ kèo thép phức tạp và mật độ đường ống kỹ thuật (MEP) dày đặc.
- Dựng hệ kết cấu thép (Kèo, Cột, Dầm): Tia laser 360° của SLAM200 bắt được chính xác hình dáng các thanh thép chữ I, chữ H hoặc thép hộp. Trong Revit, thay vì dùng tường thông thường, đội thiết kế sử dụng cấu kiện Structural Column và Structural Framing, thực hiện cắt mặt đứng (Elevation) qua đám mây điểm để đặt tiết diện thép chuẩn xác.
- Dựng hệ thống MEP và Dây chuyền sản xuất: Để phân biệt giữa các đường ống công nghệ, ống cứu hỏa và máng cáp sát trần, kỹ sư nên đổi chế độ hiển thị đám mây điểm sang Intensity (cường độ phản xạ) hoặc RGB (màu thực tế). Lệnh Pipe hoặc Duct kết hợp tính năng bắt điểm (Snap to Point Cloud) giúp vẽ tâm ống chạy dọc theo dữ liệu quét.
- Xử lý sàn nhà xưởng bị võng/lồi lõm: Đám mây điểm từ bộ quét xoay chỉ ra các vùng cao thấp không phẳng tuyệt đối của sàn qua thời gian. Người vẽ sử dụng công cụ Modify Sub-elements trên đối tượng Sàn (Floor) trong Revit để chấm các điểm cao độ thực tế, phục vụ tính toán chịu lực hoặc cải tạo nền.
Đối với Công trình hạ tầng và Đường giao thông (BIM Hạ tầng & Tuyến)
Vì Revit không tối ưu cho các công trình dạng tuyến dài, quy trình bàn giao yêu cầu sự kết hợp giữa Autodesk Civil 3D và Revit.
- Bước 1: Trích xuất bề mặt địa hình (Trong Civil 3D): Nạp file đám mây điểm
.rcptừ SLAM200 vào Civil 3D và sử dụng tính năng Create Surface from Point Cloud. Phần mềm sẽ dùng bộ lọc địa hình để loại bỏ cây cối, xe cộ, giữ lại các điểm chạm mặt đất để tạo bề mặt TIN Surface (mặt nền đường, vỉa hè). - Bước 2: Dựng mô hình tuyến và hạ tầng kỹ thuật: Dựa trên bề mặt TIN, kỹ sư vạch tim đường (Alignment), xuất trắc dọc (Profile) và áp mặt cắt (Assembly) để tạo mô hình đường 3D (Corridor). Các cấu kiện như cột đèn, biển báo, hố ga được định vị dựa trên tọa độ chính xác từ dữ liệu xoay 360°.
- Bước 3: Hợp nhất BIM tổng thể: Để đưa mô hình hạ tầng vào Revit mà không làm nặng file, đội thiết kế sử dụng tính năng Link Topography hoặc xuất mô hình cầu/cống dưới dạng file
.ifchoặc.fbxrồi chèn vào dự án tổng thể.
Tối ưu hóa tốc độ dựng hình (Plugin Scan-to-BIM)
Để tăng 50% tốc độ thay vì dựng hình thủ công (Click & Draw), kỹ sư nên áp dụng các giải pháp tự động trực tiếp trong Revit:
- Asbuilt for Revit (Faro): Tự động nhận diện mặt phẳng đám mây điểm để đặt Tường (Wall) hoặc sàn chỉ với 2 cú click chuột.
- EdgeWise (ClearEdge3D): Sử dụng thuật toán nhận diện các khối trụ tròn và thép kết cấu, tự động xuất chúng thành đối tượng Pipe và Structural trong Revit với độ chính xác tới 95%, tiết kiệm hàng tuần làm việc cho các nhà xưởng quy mô lớn.
Việc chuyển đổi từ phương pháp đo đạc truyền thống sang công nghệ SLAM200 không chỉ là sự thay đổi về thiết bị, mà là một cuộc cách mạng về hiệu suất và tư duy xử lý dữ liệu:
- Tối ưu nguồn lực: Rút ngắn 90% thời gian khảo sát hiện trường, giúp doanh nghiệp hoàn thành dự án nhanh hơn với nhân sự tối thiểu.
- Dữ liệu “không góc chết”: Cơ chế quét xoay 360 độ loại bỏ hoàn toàn sai số do góc khuất, cung cấp độ chính xác tuyệt đối cho các bài toán tính khối lượng hầm mỏ và quy hoạch phức tạp.
- Cầu nối hoàn hảo cho BIM: Dữ liệu đám mây điểm (Point Cloud) chất lượng cao là nền tảng vững chắc để xây dựng Digital Twin và triển khai quy trình Scan-to-BIM chuyên nghiệp.
Trong bối cảnh ngành xây dựng và khảo sát đang tiến mạnh lên chuyển đổi số, SLAM200 chính là giải pháp then chốt giúp các đơn vị trắc địa nâng cao năng lực cạnh tranh và đáp ứng những tiêu chuẩn kỹ thuật khắt khe nhất của thời đại 4.0.
Bạn đang tìm kiếm giải pháp hiện đại nhất? Hãy liên hệ ngay với TCMD để trải nghiệm thực tế “siêu phẩm” SLAM200 Feima này!

